| Ziel des Forschungsvorhabens ProDemo ist es, einen neuartigen, ganzheitlichen Ansatz zur Roboterprogrammierung zu entwickeln, der sowohl Online- als auch Offline-Elemente synergetisch miteinander verknüpft. Dadurch wird eine werkstattorientierte Verfahrenskette entstehen, die sowohl die aufgabenbezogene Modellierung als auch die Programmierung einer Roboterzelle deutlich vereinfacht.
|
 |
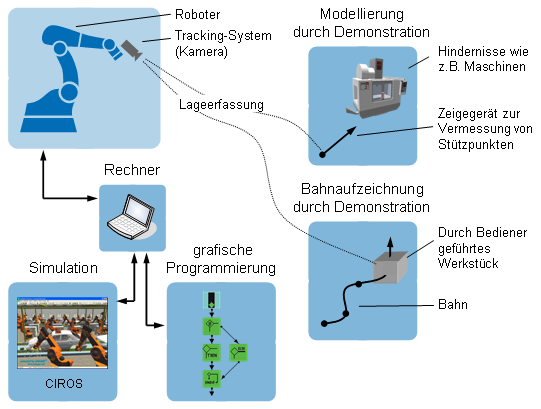
Der Bediener kann sowohl das geometrische Modell der Arbeitsumgebung als auch die relevanten Werkstückpositionen an der realen Zelle einlernen („by Demonstration“). Basierend auf diesen Daten wird dann automatisch ein Roboterprogramm erstellt und auf Kollisionen geprüft.
|